Apakah PID itu?? PID (Proporsional, Integral, Derivative) merupakan gabungan kontrol P,I dan D yang merupakan sebuah model matematika berisi Gain+Integral+Derivative yang tepat digunakan untuk mengurangi gap antara variabel yang diinginkan dan varibel kenyataan dengan melakukan penyetelan pada variabel yang dapat mempengaruhi variabel kenyataan. PID adalah hasil karya matematis yang cukup jitu untuk melakukan iterasi untuk membuat error menjadi nol. Apa artinya nol itu? artinya adalah Process variabel = Set Point atau dapat dikatakan variabel kenyataan = variabel yang diinginkan. Jika keduanya sudah sama maka itulah kestabilan dan tujuan pengontrolan sudah tercapai.
misalnya,
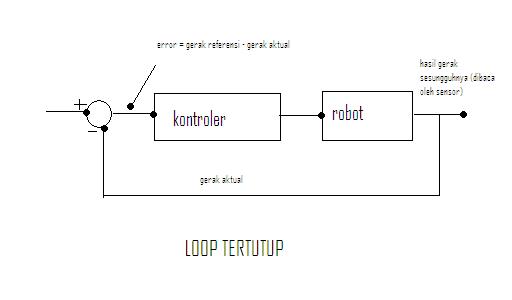
Variabel kenyataan = Robot diam
Variabel yang diinginkan = Pergerakan robot yang dinginkan
Variabel yang mempengaruhi = Pembacaan Sensor
Sekarang kita coba melihat apa saja keunggulan dan kerugian pada masing2 jenis kontrol
1. Kontrol P
Kontroler disini adalah kontrol P, dengan rumus u = Kp . e
Kp adalah Konstanta Proporsional. Kp berlaku sebagai Gain (penguat) saja tanpa memberikan efek dinamik kepada kinerja kontroler.
Pengaruh Kontrol ini pada sistem yang menggunakannya adalah :
- Menambah atau mengurangi kestabilan
- Dapat memperbaiki respon transien khususnya rise time(waktu naik) dan settling time (waktu menuju steady state)
- Mengurangi error steady state(error dalam keadaan mantap)
2. Kontrol I
u/e = Ki/s
Pengaruh Kontrol ini pada sistem adalah :
- Menghilangkan error steady state
- Dapat menimbulkan ketidakstabilan pada sistem karena menambah orde sistem
Blog diagram diatas merupakan aksi kontrol I yang dapat memperbaiki respon steady-state, namun pemilihan Ki yang tidak tepat dapat menyebabkan tidak stabilnya sistem. dan pemilihan Ki yang sangat tinggi justru dapat menyebabkan output berisolasi
-----------------------------------------------------------------------
Kontrol P dan I dapat dikombinasikan dimana dengan sifat dasar kontrol P yang cenderung Konvergen dan I yang dapat memperbaiki respon steady state maka kombinasi P-I dapat memberikan hasil yang lebih baik
-----------------------------------------------------------------------
3. kontrol D
u/e = s . Kd
Kontrol derivative ini bermain dalam konteks "kecepatan" atau rate dari error. Dengan sifat ini ia dapat digunakan untuk memprediksi error yang akan terjadi. umpan balik yang diberikan adalah sebanding dengan kecepatan perubahan e(t) sehingga kontroler dapat mengantisipasi error yang akan terjadi.
pengaruh jenis kontrol ini pada sistem adalah :
- Memperbaiki respon transien, karena memberikan aksi pada perubahan error
- Memberikan efek redapan pada sistem yang berosilasi
-----------------------------------------------------------------
Dengan kombinasi ketiga kontrol klasik ini maka kelebihan masing2 kontrol ini dapat disatukan untuk memperoleh respon yang ideal.
Namun, suatu sistem kontrol klasik kombinasi baik PI maupun PID hanya amampu bekerja baik pada sistem yang cenderung linear dalam fungsi waktu. Artinya persamaan dinamik dari model sistem relatif tidak berubah selama rentang waktu pengontrolan. Padahal dalam kenyataannya tidak ada fenomena sistem riil yang benar2 linear. Bahkan hampir semua fenomena kontrol mulai dari skala kecil, misalkna kontrol motor DC, hingga yang besar misalnya kontrol pesawat terbang tanpa awak. Jika dilakukan pemodelan secara rinci dan lengkap adalah tidak linear. setiap sistem riil selalu berhadapan dengan gangguan (disturbance). motor selalu bermasalah dengan friksi pada poros, gearbox, perubahan karakteristik karena temperatur,dll. pesawat diudara selalu berhadapan dengan tekanan udara yang berbeda-beda.
-----------------------------------------------------------------