Sistem kontrol robotik pada dasarnya terbagi menjadi dua kelompok, yaitu sistem open loop (loop terbuka) dan close loop (loop tertutup).
- kita definisikan loop terbuka adalah feed forward control (umpan maju) yang dapat dinyatakan sebagai kontrol yang outputnya tidak diperhitungkan ulang oleh kontroler.

Keadaan apakah robot benar2 telah mencapai target seperti yang dikehendaki sesuai referensi adalah tidak dapat mempengaruhi kinerja kontroler. Misalnya motor stepper, dimana stepper ini tidak perlu dipasangin sensor pada porosnya untuk mengetahui posisi akhir. Jika dalam keadaan berfungsi baik dan tidak ada masalah beban lebih maka stepper ini akan berputar sesuai dengan perintah kontroler dan mencapai posisi target dengan tepat.
yang perlu diperhatikan disini bahwa urutan dalam gerak robot dalam suatu tugas lengkap, misalnya memiliki urutan berikut : menuju ke posisi obyek, mengambil obyek, mengangkat obyek, memindahkan obyek ke posisi tertentu, dan meletakkan obyek adalah tidak selalu semua langkah operasi ini termasuk dalam kontrol loop terbuka. Dapat saja langkah menuju posisi obyek dan memindah obyek menuju posisi akhir adalah gerak berdasarkan loop tertutup. Sedangkan yang lainnya adalah loop terbuka berdasarkan perintah langkah berbasis delay.
-kita definisikan loop tertutup adalah sebuah umpan balik (feedback control), kita liat gambarnya.
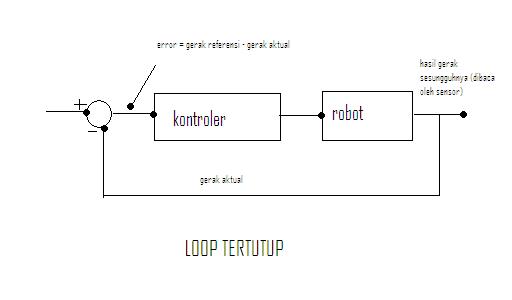
pada gambar diatas, jika hasil gerak aktual sama dengan referensi maka input kontroler akan nol. Artinya kontroler tidak lagi memberikan sinyal aktuasi pada robot karena target akhir telah terpenuhi. Makin kecil nilai error terhitung maka makin kecil pula sinyal pengemudian kontroler terhadap robot, sampai akhirnya mencapai kondisi tenang (steady state).
Referensi gerak dan gerak aktual dapt berupa posisi (biasanya didefinisikan melalui kedua ujung lengan terakhir/end of effector), kecepatan, akselerasi atau gabungan diantaranya. kontrol bersifat konvergen(adj. bersifat menuju satu titik pertemuan) jika dalam rentang waktu pengontrolan nilai error menuju nol, dan keadaan dikatakan stabil jika setelah konvergen kontroler mampu menjaga error selalu nol.
Dua pengertian dasar mengenai stabil dan konvergen sangat penting dalam kontrol loop tertutup ini. Stabil dan konvergen diukur dari sifat referensinya. Posisi akhir dikatakan konvergen bila makin lama gerakan makin perlahan dan akhirnya diam pada posisi seperti yang dikehendaki referensi, dan dikatakan stabil jika pada posisi akhir yang diam ini dapat dipertahankan dalam masa-masa berikutnya.
Jika referensinya adalah kecepatan maka disebut stabil jika pada keadaan tenang kecepatan akhirnya adalah sama dengan referensi (atau mendekati) dan kontroler mampu menjaga "kesamaan" ini pada masa-masa berikutnya. Dalam hal kecepatan, keadaan tenang yang dimaksud adalah bukan berarti output kontroler bernilai nol (tegangan nol volt) seperti keadaan sesungguhnya pada kontrol posisi, namun kontroler tidak lagi memberikan penguatan(amplify) atau pelemahan(attenuate) pada aktuator. Demikian juga jika referensinya adalah percepatan(akselerasi).